LEGO 4-wheel-drive that keeps all wheels vertically on the ground in rough terrain
31 december 2004. In this creation I tried to built a 4x4 drive that can
keep all wheels vertically on the ground in rough terrain, while the distance
between the steering axes and centers of the steering wheels is minimal. The
inspiration came from a discussion about Tatra's in the technical forum of
the dutch site: www.lowlug.nl. The following
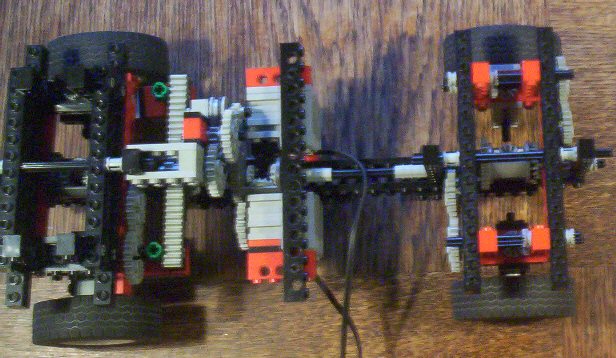
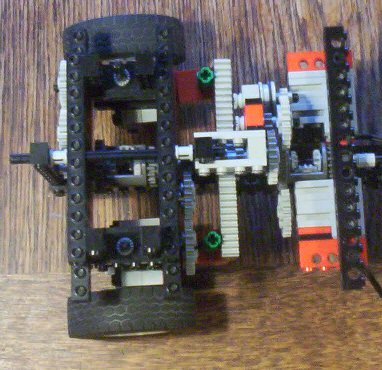
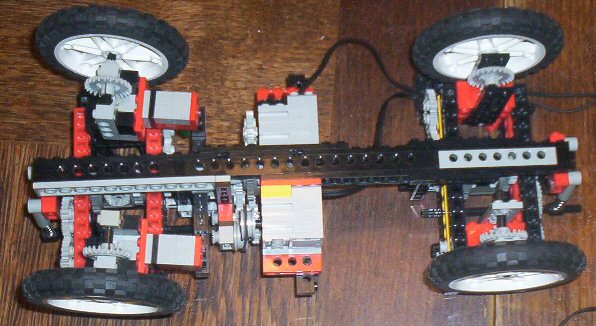
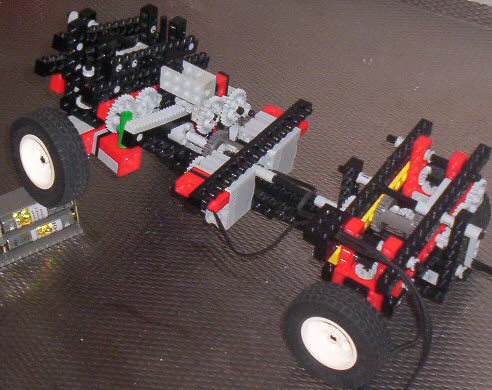
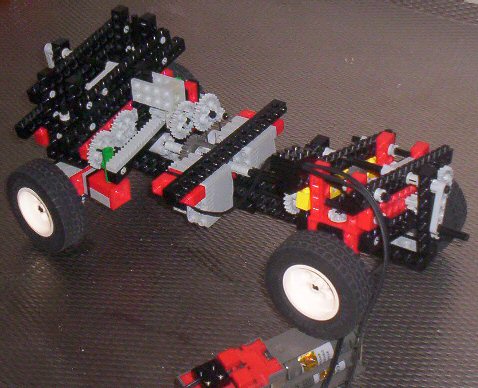
three pictures show the first result. The car exists of three parts: a structure
for the front wheels, a cenral beam for the motors and the chassis of the
car and a rear wheel construction. The shapes of the front a rear parts of
the car, or in other words, the rotation of these parts relative to the chassis,
are stable as long as the flat tires can feel some flat surface. One motor
is used to drive a differential between the front and rear wheels. The second
motor is used for steering. The steering construction is classical and adapts
it self to the rotation of the front wheel construction relative to the chassis
.
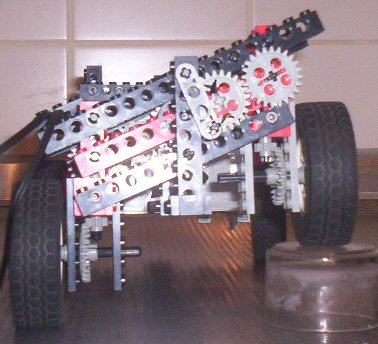
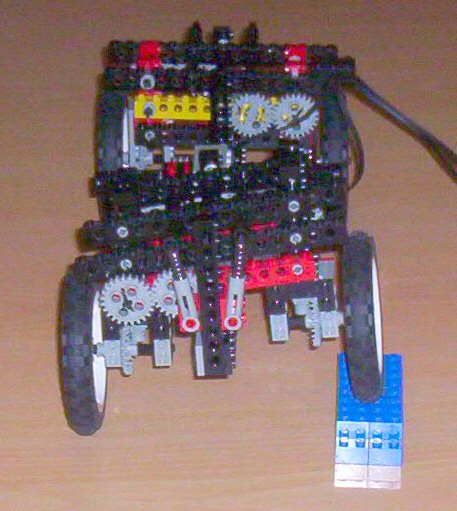
The following three pictures should give more insight in the construction.
They also show the differentials in the front and rear wheel constructions.