

May people have been inpired by LEO & LEGO to work on LEGO-realisations of very complicated mechanical structures such as as clocks and helicopter rotors. Leo also gives a very nice explanation of the working of helicopter blades. A very nice demonstration model that can only control the lift is the propperchopper on CMU's LEGO stuff This model can demonstrate lifting and landing because it is mounted on a balance. A complete model of a cobra helicopter with pneumatic control of both main and rear rotor blades (no cyclic control) has been created by Andrew Bisell and Steve Robinson .
After some experiments , we decided to be less ambitious and to build a new approach for the propperchopper.
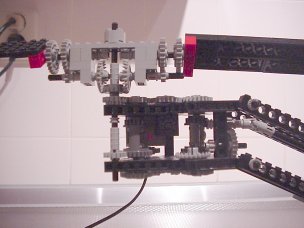
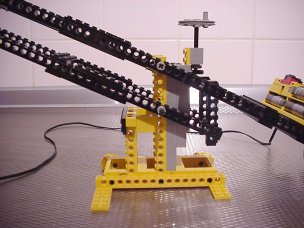
This creation consists of a balance, a manual control for the angel of the rotor blades (the wheel in the middle), and an adder-subtracter construction with a motor to drive the rotor. The blades move up or down depending on the angle of the blades. The equlibrium can be fine-tuned by pushing or pulling the big wheel at the end with the batteries inwards or outwards. The adder-subtracter is used for generating two speeds that differ by the speed of the manual control wheel in the middle of the construction. This design for the adder-subtracter is conceived and explained by Denis Cousineau
Details are given in the following pictures.
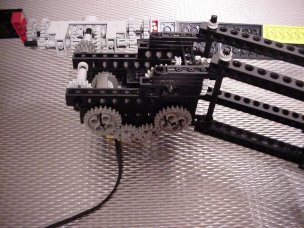
The dark grey free spinnning gear wheels that come with the
differentials can be fixed to each other and are used to drive the gears that
control the angle of the blades. The rotor construction is fixed to the axis
by the cilindre element on top. The motor drives the gear on the left differential
housing , while the manual control drives the gear wheel on the right differential
housing indirectly via two flexible axes and a number of gears.
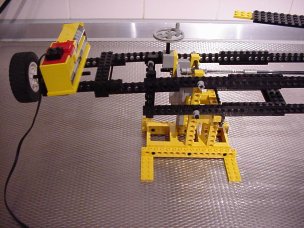
This picture shows the site of the adder-subtractor opposite
to the motor. For getting a view on the other site in the next picture, the
motor has been removed.
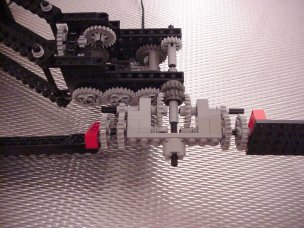
The following pictures also show this site , with and without the motor.

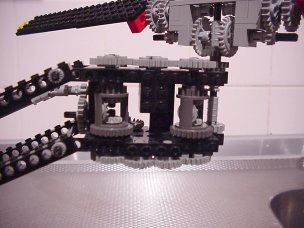
The last pictures give a detailed view on the foot of the balance.
The foot also prevents the balance to get in a state where he blades would hit the construction.
This construction appeared to work very nicely and it lets the user control the lift of the rotor very precisely.
We think that the idea of demonstrating the working of a helicopter with a balance can be extended to other movements of a helicopter as well. So comments and suggestions are welcome!
![]()