LEGO 1:13 6x6 Truck
.
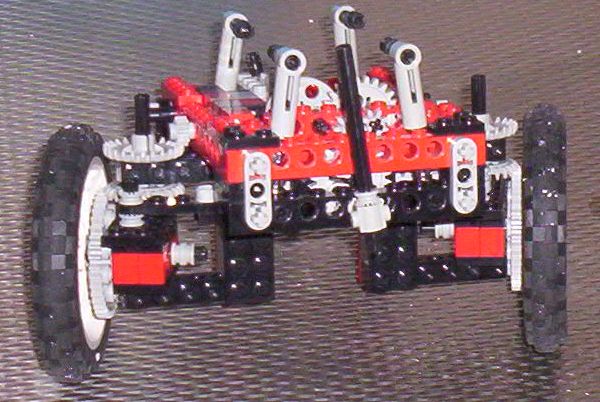
14 August 2005. At the end of 2004 a number of forum discussions started on 4x4 wheel drives on the Dutch Lego technic forum of www.lowlug.nl. As a result a Lego Truck Trial was proposed in februari 2005. A prologue was organized in Geldringen and lots of pictures have been published on www.brickshelf.com. The trial event has not been organizid yet. Participants have to comply to a number of rules: the scale is set to 1:13, all wheels should be driven, suspension for all wheels, a maximum width of 24 studs, a maximum of 2 motors for power, no rc-motors, a real cabine and a fake motor with cylinders, a platform for loads of minimum size 24 x 30 studs. Options for the wheels are: 24x43 from the 8860, 81.6x34 ZR from the 8880 or the 68.8 x 24 S from the 5571. I decided to particpate, although I don't have the required wheels. The next picture shows my latest result (version 6! ).

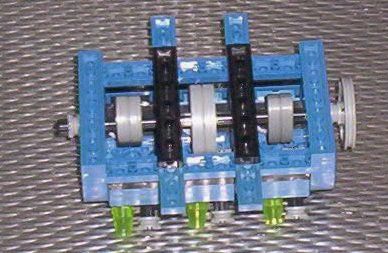
This truck features a cabine that can be tilted forward to get access to the
fake blue cylinder motor. The cylinders are axes that move up and down when
the cams (assymetrical kind of wheels) inside the motor are rotated. The wheels
have the same diameter as the requred wheels. So, this truck has been prepared
already to drive with those wheels.

The frontwheel assembly is suspended with 4 shockbreakers. The assembly can shift up and down along two vertical axis and rotate over the imaginary axis between the shifting connections. The steering mechanism is driven by an elastic belt and a motor in the middle of the truck. The steering wheel in the cabine is driven by flexible joints. The dashbord can be tilted.

The frontwheels are driven by a differential. The assembly is connected to
the motor block in the middel by a central axis with wo flexible joints and
a construction to make its lengthe adjustable. The construction is optimized
for a trial in which a lot of torque on the wheels is required. The gear ratio's
in the transmission to each wheel is 1:5. The gear ratio in the transmission
to the differentials is 1:3. The cenral motor block is featured with a two
speed gearbox with ratio's 1:1 and 1:3.
The rear wheels aer suspended independantly. Each assembly rotates around
two axes at the ends of the axis paralel to the differential. These axes are
not connected to each other to reduce the influence of forces in the structures
on the transmission axes. Each wheel should have two shock breakers. The pictures
show one because I have two wait for new ones. The shock breakers can be connected
to points on different distaces from the cenral axis dependig on the load
and the number of rear wheels. I want two add an extra pair of rear wheels
in the near future.
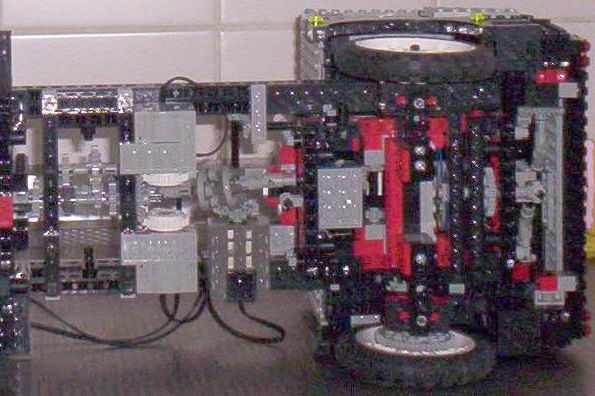
This truck appears to be strong enough. It can take steps of 3 cm and a slope of 45 degrees. All previous versions suffered from parts getting loose. Every time a fixed a weak point in the structures revealed a new weak point. wheels sliding of axes, gears making al kinds of noise, etc. The next pictures shows the test site.

Most of the techniques have been demonstrated in a 4x4 version.
The illustrated story of the previous versions can only be read in Dutch. Dutch pages about all versions.